با پيشرفت روز افزون علم و فناوري همواره نياز هاي جديد به وسايل و دستگاه هاي جديد تر جهت هماهنگي همه بخشهاي صنعت با اين پيشرفت ، به وجود مي آيند. بدين منظور شناخت و طراحي راه كارها و وسايل جديد امري است اجتناب ناپذير.از جمله اين پيشرفت ها ساخت نوع جديد و پيشرفته تري از موتورهاي الكتريكي به نام استپ موتور ها يا موتورهاي پله اي است كه با كاهش انواع هزينه ها در صناع كم كم جاي مكانيزم هاي پيچيده مكانيكي را خواهند گرفت.در اين مقاله سعي شده است تا بسيار مختصر و متناسب با محدوديت ها بزباني ساده و قابل درك ساختار و نحوه كاركرد و كنترل موتورهاي استپي بررسي و بيان شود.
مقدمه:
با درك ميدان هاي مغناطيسي و كشف آنكه مي توان انرژي الكريكي را به انرژي مكانيكي تبديل نمود تحولي عظيم در تاريخ بشري بوجود آمد ، بگونه اي كه بشر روز به روز به تفكر و طراحي و ساخت وسايلي كه بتوانند با استفاده از انرژي الكتريكي ، انرژي مكانيكي توليد نمايند روي آورد. از اين رو انواع موتور هاي الكتريكي به صحنه وجود آمده و همچنان سير تكميلي خود را طي نمودند تا به امروز كه مي توان براي هر نوع كاربري ، نوع خاصي از موتورها را بكار برد. اما ساخت اسپ موتور با امكاناتي كه به طراحان و سازندگان ماشين آلات ميدهد ، به گونه اي برجسته سبب كاهش هزينه ها در همه زمينه ها مي شود. يكي از چندين مزاياي بسيار زياد اين نوع الكتروموتورها تبديل مكانيزم هاي بسيار پيچيده مكانيكي ، به تنها يك محرك استپي مي باشد. در ادامه با اين پديده جالب آشنا تر خواهيم شد.
استپ موتور يا موتور پله اي
يك استپ موتور وسيله اي الكتريكي است چرخش زاويه اي گسسته يا پله اي دارد و با اتصال به ضربان هايي در فركانسي خاص كار مي كند. هر ضربان فرستاده شده به موتور سبب حركت محور موتور تا زاويه اي معين مي شود كه اين زاويه ، زاويه استپينگ (Stepping Angle) ناميده مي شود.
شكل 1 ساختمان ساده شده يك استپ موتور "Bifilar" مگنت دائمي را نشان مي دهد.
روتور از جنس آهنرباي دائمي است و شش دندانه دارد كه با فاصله هاي مساوي و يك در ميان در قطب هاي N و S اطراف روتور قرار دارند.استاتور چهار قطب دارد كه هر قطب داراي پيچه اي است كه اين پيچه از مركز خروجي V را داراست.
پيچه هاي روي قطب هاي مختلف به هم وصلند بطوري كه فقط پنج سيم A , B , C , D & +V از موتور خارج مي شوند.پيچه با ارسال جريان به سيم +V و خروج آن از يكي از سيمهاي ديگر فعال مي شود.
سيم پيچ ها در دندانه هاي استاتور به روشي پيچيده مي شوند به طوريكه نتايج زير حاصل مي شود :
- اگر سيم B فعال باشد ، قطب 1 شمال و قطب 2 جنوب خواهند بود و اگر سيم A فعال باشد قطب 1 جنوب و قطب 2 شمال مي شود.
جنوب و اگر سيم D فعال باشد قطب 3 جنوب و در عوض قطب 4 شمال خواهند بود.
عملكرد استپ موتورها براساس اين قانون است كه وقتي قطبهاي مشابه دفع مي شوند ، قطبهاي مخالف جذب مي شوند. اگر سيم پيچ ها در توالي صحيح فعال باشند روتور در مسير و جهتي معين خواهد چرخيد.
شكل 2 نشان مي دهدكه روتور هنگامي كه پيچه ها با توالي داده شده در جدول 1 فعال اند چگونه مي گردد.
همانطور كه در شكل 2 مشاهده مي شود ، ترتيب القاهاي داده شده در در جدول 1 سبب چرخش روتور در جهت عقربه هاي ساعت مي شود.
اگر توالي اين القا ها معكوس شود ، جهت حركت نيز معكوس مي شود.
اگر حتي همه القا ها متوقف شده و هيچ جرياني به موتور وارد نشود ، به علت وجود آهنرباهاي دائمي در روتور بازهم مقداري جاذبه ميان قطب ها و دندانه ها وجود دارد. از اين رو حتي هنگامي هم كه هيچ تغذيه اي به موتور متصل نيست ، بازهم قدري ((گشتاور نگه دارنده)) در موتور باقي مي ماند.
از شكل 2 مي توان مشاهده نمود كه موتور زاويه استپينگ يا زاويه مرحله 30 درجه دارد و براي كامل كردن يك چرخه به 12 استپ يا مرحله نياز دارد. تعداد مرحله ها در هر دور در يك موتور استپي با اضافه كردن دندانه هاي بيشتر روي روتور مي تواند افزايش يابد و با اضافه كردن دندانه هايي به دندانه هاي استاتور ، زاويه استپينگ يا زاويه طي مرحله يك موتور استپي را مي توان تا حد 1.8 درجه كوچك كرد به طوري كه براي طي يك چرخه دويست مرحله نياز باشد.
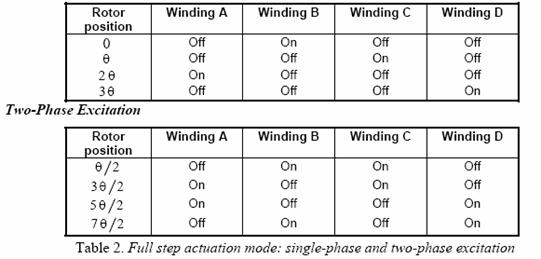
برنامه القاي پيچه ها در شكل 2 به القاي تك فاز معروف است ; از آنجا كه در هر زمان فقط يكي از چهار پيچه فعال است.
در هر مرحله دندانه هاي روتور دقيقا رد مقابل دندانه هاي فعال استاتور قرار مي گيرند. با اين حال راه اندازي موتور با دو پيچه حامل جريان در يك زمان امري ممكن است (القاي دو فازي). در اين حالت دندانه هاي روتور خود را در ميان دوتا از دندانه هاي فعال استاتور قرار مي دهند. جدول 2 برنامه كاري و موقعيت روتور را براي القاي دو فاز و تك فاز نشان مي دهد.توجه داشته باشيد كه زاويه مرحله يا همان Stepping Angle براي دو نوع القا يكي است بجز اينكه موقعيت هاي روتور با نصف زاويه مرحله تعيين مي شوند.
اگر القاي تك فاز و دو فاز با هم تركيب شوند ، يك حالت نيم مرحله (Half Step mode) حاصل مي شود. در اين حالت تعداد مراحل يا استپ ها در هر چرخه دو برابر است ; به طوري كه اگر موتوري در حالت مرحله كامل يا Full – Step براي كامل كردن چرخه به دويست دور نياز داشته باشد ، در حالت نيم مرحله يا Half – Step به چهارصد دور براي تكميل آن نياز دارد. جدول 3 توالي كاركرد براي حالت نيم مرحله نشان مي دهد.
استپ موتوري كه در بالا شرح داده شد از دو پيچه با در مقابل هم قرار دادن مگنت هاي همنام در هر قطب استفاده مي كند. به اين دليل است كه اين نوع ، استپ موتور "Bifilar" ناميده مي شود.
نتيجه گيري
كارايي و امكانات يك استپ موتور بسيار بيشتر از انواع ديگر الكترو موتورها مي باشد. بدين لحاظ كه بسياري مكانيزم ها و حالات مختلف چرخش را مي توان از آنها گرفت و همچنين اين كه كنترل اين موتور ها بسيار آسان تر از سايرين است به طوري كه عمدتا به وسايل كنترل سرعت اضافي از قبيل ترمز هاي الكتريكي و مكانيكي نيازي ندارند.
پس بر ماست تا با افزايش دانش خود در مورد اين نوع كارامد از موتورهاي الكتريكي سعي در استفاده هرچه بيشتر از امكانات آنها كنيم